

Introducción a Ardupilot y PX4 - Parte 1: Soluciones de Autopiloto Para Drones
Autor: Raúl Alvarez-Torrico
Esta es una traducción automática (pueden haber algunos errores de traducción) de mi artículo original en inglés publicado por la revista “Circuit Cellar” (#357 de Abril, 2020). El código de programa y diagramas aún están en Inglés.
 Resumen
Resumen
Las plataformas de piloto automático de código abierto Ardupilot y PX4 son dos de las más populares usadas en pequeños vehículos no tripulados para una amplia variedad de aplicaciones en diferentes áreas, como ser: investigación y desarrollo, comercial, industrial, académica y afición al modelaje entre otras. En la Parte 1 de esta serie de artículos comenzaré hablando de la arquitectura general de un dron multirotor y sus principales componentes de software y hardware. Luego, daré una introducción general a las plataformas Ardupilot y PX4 y analizaré algunos ejemplos de hardware de controlador de vuelo compatibles, tipos de vehículos y software de control de tierra disponible. También daré una introducción general al protocolo MAVLink utilizado en ambas plataformas para comunicar vehículos con estaciones de control en tierra. En la Parte 2 de esta serie de artículos, hablaré acerca de cómo construir un quadrirotor para fotografía aérea basado en una de las plataformas antes mencionadas y presentaré una configuración que, con modificaciones menores, también podría usarse como punto de partida para la experimentación futura con navegación autónoma y seguimiento de objetos basado en visión por computador.
La información presentada aquí está dirigida principalmente a estudiantes y aficionados que desean comenzar a construir drones multirotor con software y hardware Ardupilot y PX4 de código abierto, pero no tienen conocimientos básicos generales acerca de multirotores y las plataformas antes mencionadas. Al final de la serie de artículos, se presentará la información necesaria para comprender la arquitectura general de un multirotor y elegir una de las dos plataformas para construir un dron para fotografía aérea.
 Introducción
Introducción Por Raúl Álvarez Torrico
Por Raúl Álvarez Torrico Autor: Raúl Alvarez Torrico
Autor: Raúl Alvarez Torrico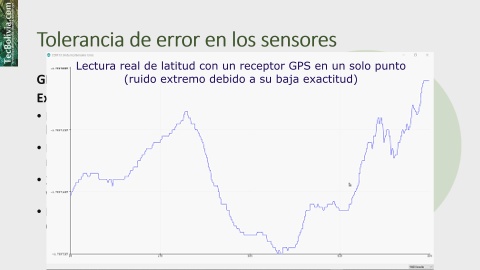 Este mini curso es una introducción práctica al filtraje de sensores aplicado a sistemas de control en general y a robótica en particular.
Este mini curso es una introducción práctica al filtraje de sensores aplicado a sistemas de control en general y a robótica en particular.